CRP-RH14-06-W

技术参数
①使用高速电机,并做软件优化,整体节拍比上一代快20%;
②更轻量化,小臂尺寸更小,可达性更好;
③高防护:J1、J2轴加装防尘量,同时使用全包围焊枪;
④J4、J6轴中空结构,可使用中空焊枪;
⑤内置用户线、气管、焊接电缆,通体流畅,外观整洁。
| 型号 | CRP-RH14-06-W | |
| 手臂形式 | 垂直多关节 | |
| 轴数 | 6轴 | |
| 最大负载 | 6kg | |
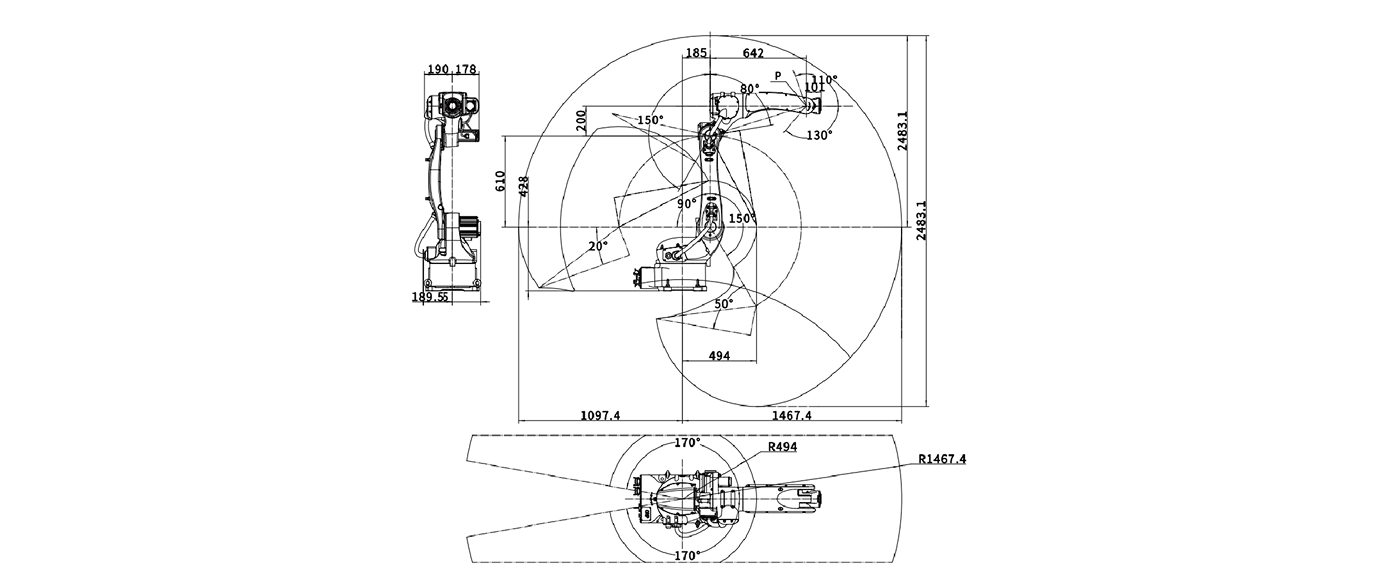
| 运动范围 | J1 | ±168° |
| J2 | ﹣50°~170° | |
| J3 | ﹣78°~150° | |
| J4 | ﹣190°~190° | |
| J5 | ﹣110°~130° | |
| J6 | ±190° | |
| 最大速度 | J1 | 230°/s |
| J2 | 230°/s | |
| J3 | 230°/s | |
| J4 | 430°/s | |
| J5 | 430°/s | |
| J6 | 630°/s | |
| 容许力矩 | J4 | 10N·m |
| J5 | 10.5N·m | |
| J6 | 5.9N·m | |
| 容许惯性力矩 | J4 | 0.25kg.m² |
| J5 | 0.25kg.m² | |
| J6 | 0.05kg.m² | |
| 重复定位精度 | ±0.08mm | |
| 最大覆盖范围 | 1468mm | |
| 本体重量 | 155kg | |
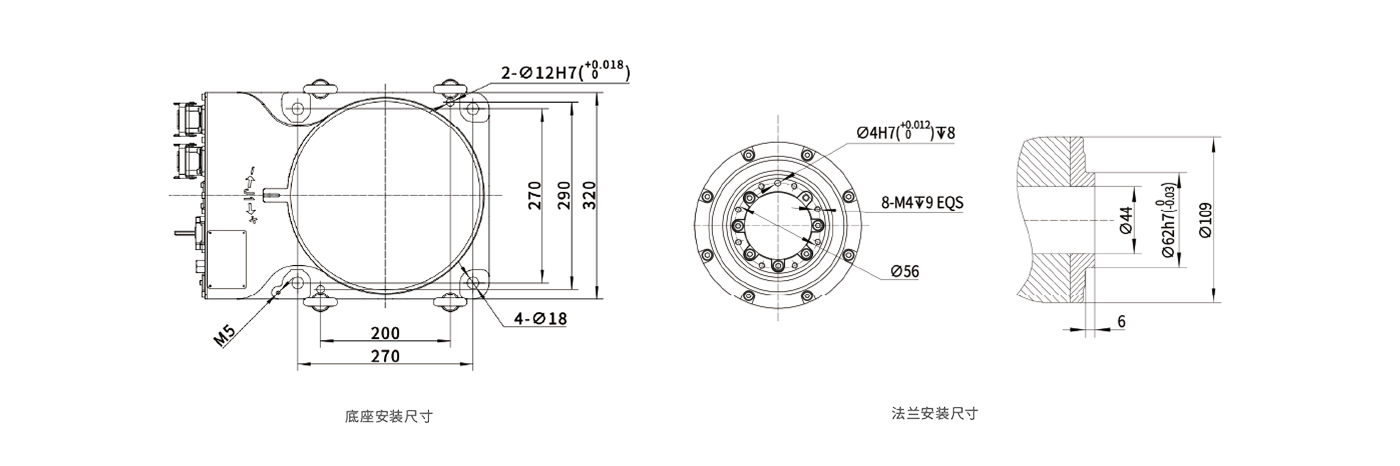
| 安装方式 | 正装/侧装/侧装 | |
| 本体接口 | 预留IO | 16Pin |
| 预留气管 | 2*∅8mm | |
| 安装环境 | 环境温度 | 0~45° |
| 相对湿度 | 20%~80%RH(无结露) | |
| 振动 | 0.5G以下 | |
| 其他 | 机器人安装地必须远离:易燃、腐蚀性液体/气体,电气干扰源 | |
| IP等级 | 腕部IP67,其余IP54 | |
| 特点 | 结构紧凑、高速度、高精度、高扩展性、易操作 | |
| 应用场合 | 焊接 | |
| 标配电柜 | G9电柜 | |